EMESENTはCOMMERCIAL UAV EXPO 2022に出展。

これはホバー マップ St バージョンです。
これは、45 度の角度で角度のついたパック ダウンを備えた最新バージョンです。
これは、45 度の角度で角度のついたパック ダウンを備えた最新バージョンです。

そしてそれは、スラムベースのライダーです。
つまり、ローカライズとマッピングを同時に行っています。
つまり、ローカライズとマッピングを同時に行っています。

そのため、回転して 3D 環境を収集しているため、その環境を使用して、航空機や GPS が拒否された環境をナビゲートすることもできます。

そのため、GPS ソリューションがないためにほとんどの航空機が飛べない場所での採掘に力を入れています。

実際のライダーを使用して航空機を操縦できます。

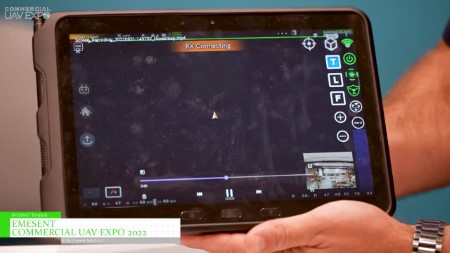
私はあなたに示すことができる例を少し持っています.それが出てくるかどうかはわかりません..

ここに私たちは倉庫にいます.GPSが拒否された環境があります.

ホバー マットを起動して回転を開始します。これは、飛行中の DJI m300 プラットフォームと通信しています。

ソリューションを取得し、GPS なしで適用できるようになり、離陸し

て、ライブ 3D ポイント クラウドに切り替えます。
建設中のエリアが表示され始めます。
建設中のエリアが表示され始めます。

ご覧のとおり、これは倉庫の一部であり、非常にまばらなポイント クラウドのようなものです。

何を見ているのか、どこへ飛んでいるのかを知るには、これで十分です。
これで、実際に入ってウェイポイントを与えることができます。
その点群をナビゲートして、どこを見ているかを確認できます。
その点群をナビゲートして、どこを見ているかを確認できます。

航空機がこれらのポイントに自律的に飛行するまで、ウェイポイントを与えることができます。
同時に、それらのポイントに到達するために障害物を回避します。
同時に、それらのポイントに到達するために障害物を回避します。

ここでいくつかのポイントを示しましたが、どこにも置くことができず

、航空機は出て、実際に探査モードに入ります。
そのため、それらを配置するときに少し早送りします。
そのため、それらを配置するときに少し早送りします。

いったん配置すると、このビデオでは下を見るのが非常に難しくなり

ますが、天井にたくさんの延長コードがぶら下がっているのがわかります。
そのため、航空機がそのポイントに到達するためにその周りをナビゲートすることがわかります。
そのため、航空機がそのポイントに到達するためにその周りをナビゲートすることがわかります。

最初のウェイポイントを達成すると、次のウェイポイントに進みます。

また、構築中の環境を使用して、最適なルートを見つけます。

この領域に 近づく
につれて、より多くのデータとより多くの情報を持っているため、点群がより多くを埋め始めることがわかります。
につれて、より多くのデータとより多くの情報を持っているため、点群がより多くを埋め始めることがわかります。

そのため、ナビゲートして次のウェイポイントを見つけます。

そして、最後のものになると、移動したい場所への障害が少し増えます。

その時点で私は航空機の制御を取り、それを着陸する場所に戻します。

スティックを制御せずに自動着陸することもでき

ます。スキャンを停止し、それを元に戻して、これを好転させるだけです。

ホバー マップの裏側を見てみましょう。これ

を開くと、USB ポートが 1 つあり、そこにサム ドライブを挿入します。
そして、そこにあるまだダウンロードされていないスキャンのダウンロードを開始します。
そして、そこにあるまだダウンロードされていないスキャンのダウンロードを開始します。

そのため、これには 500 ギガバイトのストレージが内蔵されています。
したがって、これらのスキャンはすべて、削除するまでそこに残ります。
したがって、これらのスキャンはすべて、削除するまでそこに残ります。

しかし、新しいスキャンが必要なときはいつでも、サム ドライブを挿入するだけで、自動的にダウンロードされます。

そして、それを処理するためにソフトウェアに移動します。

そして、このソフトウェアの良い点は、スキャンの約 1.5 倍の時間がかかることです。
それを処理するには、10 分間のフライトを行う場合、処理して完全なポイント クラウドを取得するのにおそらく約 15 分かかることになります。
それを処理するには、10 分間のフライトを行う場合、処理して完全なポイント クラウドを取得するのにおそらく約 15 分かかることになります。

Las、Laz、e57、OBG、obj でエクスポートできます。

すべてのサードパーティ製ソフトウェアに入るために必要なすべてのファイル形式。
そして、その時点から、それをクリーンアップして、顧客に送ります。
そして、その時点から、それをクリーンアップして、顧客に送ります。